Правильный выбор мощности двигателя для привода должен удовлетворять требованиям экономичности, производительности и надежности рабочей машины. Установка двигателя большей мощности, чем это необходимо по условиям привода, вызывает излишние потери энергии при работе машины, обусловливает дополнительные капитальные вложения и увеличение габаритов двигателя. Установка двигателя недостаточной мощности снижает производительность рабочей машины и делает ее работу ненадежной, а сам двигатель в подобных условиях легко может быть поврежден.
Двигатель должен быть выбран так, чтобы его мощность использовалась возможно полнее. Во время работы двигатель должен нагреваться примерно до предельно допустимой температуры, но не выше ее. Кроме того, двигатель должен нормально работать при возможных временных перегрузках и развивать пусковой момент, требуемый для данной рабочей машины.
В соответствии с этим мощность двигателя выбирается в большинстве случаев на основании условий нагрева (выбор мощности по нагреву), а затем производится проверка соответствия перегрузочной способности двигателя условиям пускав машины и временным перегрузкам. Иногда (при большой кратковременной перегрузке) приходится выбирать двигатель по требуемой максимальной мощности. В подобных условиях длительная мощность двигателя часто полностью не используется.
А. Выбор мощности двигателя для привода с продолжительным режимом работы. При постоянной или мало изменяющейся нагрузке на валу мощность двигателя должна быть равна мощности нагрузки. Проверки на нагрев и перегрузку во время работы не нужны. Однако необходимо проверить, достаточен ли пусковой момент двигателя для пусковых условий данной машины.
Мощность продолжительной нагрузки ряда хорошо изученных механизмов определяется на основании проверенных практикой теоретических расчетов.
Например, мощность двигателя (кВт) для вентилятора:
 (1)
(1)
где V — количество нагнетаемого или всасываемого воздуха, м3/с;
∆р — перепад, Па;
ηвен – коэффициент полезного действия (КПД) вентилятора (у крыльчатых вентиляторов 0,2 — 0,35, у центробежных — до 0,8);
ηпер — КПД передачи от двигателя к вентилятору;
произведение V∆р представляет собой полезную мощность вентилятора, а 1000 — коэффициент для перевода мощности в киловатты.
Во многих случаях мощность двигателя приводов с продолжительным режимом работы рассчитывается по эмпирическим формулам, проверенным длительной практикой. Для малоизученных приводов продолжительной нагрузки мощность двигателя часто определяется на основании удельного расхода энергии при выпуске продукции или экспериментально путем испытания привода.
Б. Выбор мощности двигателя при кратковременном и повторно-кратковременных режимах работы. При кратковременном, повторно кратковременном и продолжительном с переменной нагрузкой режимах важно знать закон изменения во времени превышения температуры # двигателя над температурой окружающей среды.
Электрическая машина с точки зрения нагрева представляет собой весьма сложное тело. Тем не менее при расчетах, не требующих большой точности, можно считать электрическую машину однородным телом. Это дает возможность применить к ней упрощенное уравнение нагрева
 (2)
(2)
где С — теплоемкость машины;
Н -ее теплоотдача;
Q0 — теплота, выделяющаяся в машине в единицу времени.
При t = 0 начальное превышение температуры ? = ?о, так что постоянная А = превышения температуры машины:
 (3)
(3)
Таким образом, в данном случае, как и при ???? =????о, превышение температуры возрастает по экспоненциальному закону, стремясь к значению
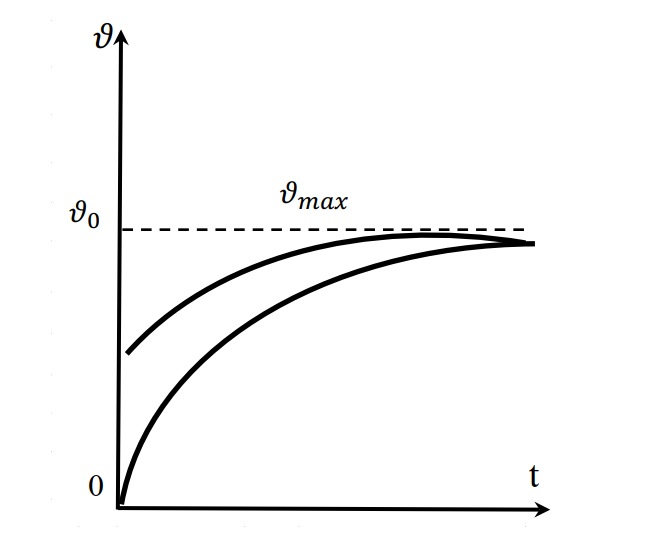
Рисунок 1. Начальное превышение температуры
Начальное превышение температуры изменяет лишь скорость изменения температуры, но не характер процесса рисунок 1.
При различных значениях продолжительной нагрузки одной и той же машины зависимости ?(t) различаются лишь ординатами рисунок 2.
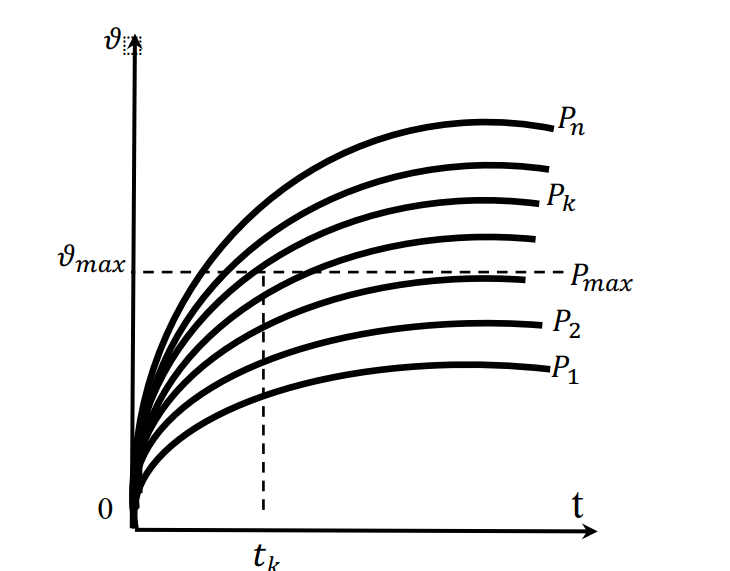
Рисунок 2. Температура при различных продолжительных нагрузках
Наибольшее допустимое для данной машины превышение температуры равно ?ном. Прямая ? = ?мом, параллельная оси абсцисс, пересекает в различных точках кривые ?(t), соответствующие различным значениям мощности нагрузки Рк электродвигателя. Абсцисса точки пересечения определяет тот промежуток времени tk, в течение которого мощность двигателя может быть временно равна мощности Рк, представляющей собой перегрузку по отношению к его номинальной мощности в продолжительном режиме. График нагрева приближающийся к ?ном, соответствует номинальной мощности двигателя Рном.
При нагрузках, меньших Рном, мощность двигателя полностью не используется. Однако если двигатель загружается на относительно короткое время, то, по существу, он тоже используется не полностью. Целесообразно его кратковременно перегрузить и чем меньше продолжительность работы, тем больше должна быть эта перегрузка. Предел повышения нагрузки двигателя по мере уменьшения продолжительности включения определяется мгновенной перегрузочной мощностью двигателя, зависящей от его электрических свойств (максимального момента у асинхронного двигателя, условий коммутации у машин постоянного тока и т. п.).
При повторно-кратковременном режиме двигатель попеременно то нагревается, то охлаждается. Изменение его температуры в течение времени каждого цикла зависит при этом от предыдущего теплового состояния. Зависимость нагрева и охлаждения машины от времени в подобных условиях показана на рис. 3. Конечное превышение температуры каждой данной части цикла равно начальному превышению температуры для последующей части цикла. Если во время той или иной части цикла наступает значительное изменение условий охлаждения (остановка двигателя или заметное изменение частоты вращения), то изменяется постоянная времени Т=С/Н нагрева двигателя, что должно быть учтено при построении графиков.
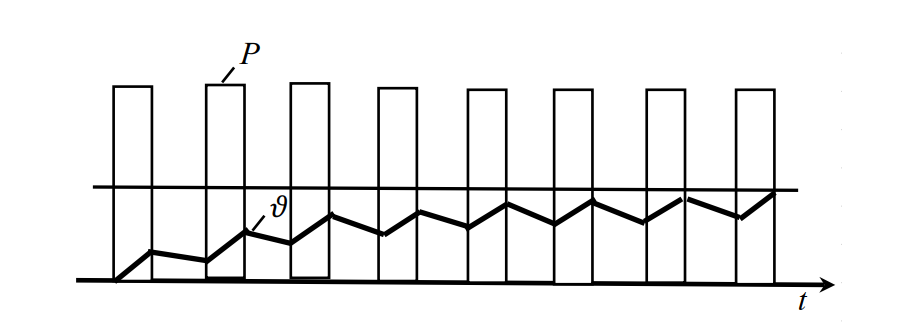
Рисунок 3. Зависимость нагрева и охлаждения машины от времени
Определение мощности двигателя по условиям нагрева посредством построения графиков нагрева требует значительной затраты времени и не дает точных результатов. Здесь эти построения приведены лишь для того, чтобы наглядно показать картину изменения нагрева двигателя при переменной нагрузке.
В большинстве случаев для выбора мощности двигателя применяются более простые методы, в частности метод эквивалентного тока. В основу этого метода положено допущение, что при переменной нагрузке двигателя его средние потери должны быть равны потерям при продолжительной (номинальной) нагрузке.
Нагревание двигателя, обусловленное потерями, в обоих случаях должно быть одинаковым. На этом основании определяем эквивалентный ток:
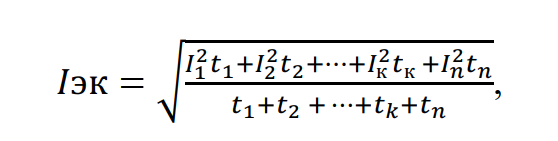 (4)
(4)
Зная эквивалентный ток, номинальное напряжение и номинальный коэффициент мощности, можно определить номинальную мощность двигателя:
 (5)
(5)
Расчёт мощности трёхфазного электродвигателя производится по следующей формуле:
 (6)
(6)
где: U-номинальное напряжение;
I — номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
cosφ — коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
η — коэффициент полезного действия (КПД) — отношение электрической мощности, потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя).
Полученный результат можно округлить до ближайшего стандартного значения мощности.
Стандартные значения мощностей электродвигателей: 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 11; 15; 18,5; 22; 30; 37; 45; 55; 75 кВт и т.д.
При длительной неизменной нагрузке задача выбора вида двигателя (постоянного тока, асинхронного, синхронного) относительно проста. Для подобного привода, не требующего регулирования скорости, ПУЭ (Правила устройства электроустановок) рекомендуют независимо от мощности применять синхронные двигатели. Эта рекомендация объясняется тем, что современный синхронный двигатель пускается в ход так же, как асинхронный, а его габариты меньше и работа экономичнее, чем асинхронного двигателя той же мощности (выше cos????, больше максимальный момент).
Но если электродвигатель должен работать в условиях регулируемой частоты вращения, частых пусков, выбросов и сбросов нагрузки и т.п., то при выборе вида двигателя необходимо сопоставить условия привода, с особенностями механических характеристик различных видов электродвигателей. Принято различать естественную и искусственную механические характеристики двигателя. Естественная механическая характеристика соответствует номинальным условиям его включения, нормальной схеме соединений и отсутствию каких-либо добавочных элементов в цепях двигателя. Искусственные характеристики получаются при изменении напряжения на двигателе, включении добавочных элементов в цепи двигателя и соединении этих цепей по специальным схемам.
Важным критерием для оценки механических характеристик служит их жесткость.
Жесткость может быть различной для отдельных участков характеристики.
Требования к жесткости механической характеристики в ряде случаев служат основанием для выбора вида двигателя. Например, для подъемно-транспортных механизмов желательна мягкая характеристика, а для станов холодной прокатки стали нужна очень жесткая характеристика.
При частых пусках и непостоянной нагрузке наиболее надежным и простым в эксплуатации и вместе с тем дешевым является асинхронный двигатель с короткозамкнутым ротором. Двигатель с фазным ротором дороже, его обслуживание сложнее, габариты больше, a cos ? меньше (из-за большего воздушного зазора).
Преимущества фазного ротора в отношении пускового момента незначительны по сравнению с короткозамкнутым ротором, имеющим двойное беличье колесо. Поэтому двигатели с контактными кольцами устанавливаются лишь при наличии особых требований к пусковому моменту или к пусковому току. Таким образом, для мощностей до 100 кВт при нерегулируемом приводе наиболее распространен асинхронный короткозамкнутый двигатель. При больших мощностях, если невозможно применить короткозамкнутый асинхронный двигатель, устанавливается асинхронный двигатель с фазным ротором.
В настоящее время положение существенно изменилось благодаря внедрению силовых полупроводниковых преобразователей. Они дают возможность преобразовывать частоту переменного тока, что позволяет плавно и в широких пределах регулировать угловую скорость вращающегося магнитного поля, а следовательно, экономично и плавно регулировать частоту вращения асинхронных и синхронных двигателей. Двигатель постоянного тока стоит значительно дороже, требует большего ухода и изнашивается быстрее, чем двигатель переменного тока. Тем не менее в ряде случаев предпочтение отдается двигателю постоянного тока, позволяющему простыми средствами изменять частоту вращения электропривода в широких пределах (3: 1, 4 :1 и более).
В качестве примеров приводов, для которых рекомендуется постоянный ток, назовем следующие: в металлургической промышленности — реверсивные прокатные станы, регулируемые нереверсивные станы при многодвигательном приводе, вспомогательные механизмы повторнократковременного режима работы, доменные подъемники; в металлообрабатывающей промышленности — токарные специальные станки.
Конструкцию (тип) двигателя выбирают в зависимости от условий окружающей среды. Приходится учитывать необходимость защиты среды от возможных искрообразований в двигателе (при наличии горючей пыли, взрывоопасных смесей и т. п.), а также самих двигателей от попадания в них влаги, пыли, агрессивных химических веществ из окружающей среды.
Двигатель производственного агрегата должен наиболее полно отвечать технико-экономическим требованиям, т.е. отличаться простотой конструкции, надёжностью в эксплуатации, наименьшей стоимостью, небольшими габаритами и массой, обеспечивать простое управление, удовлетворять особенности технологического процесса и иметь высокие энергетические показатели при различных режимах работы.
В нерегулируемых приводах малой и средней мощности используют в большинстве случаев трёхфазные асинхронные двигатели с короткозамкнутым ротором, конструктивное исполнение которого согласуют с необходимыми пусковыми условиями производственного агрегата. Если эти двигатели не могут обеспечить условия пуска, применяют трёхфазные асинхронные двигатели с фазным ротором, благодаря которому можно не только получить увеличенный начальный пусковой момент, но и добиться его снижения до заданного значения. Для привода установок средней и большой мощности целесообразно использовать трёхфазные синхронные двигатели, которые отличаются от аналогичных трёхфазных асинхронных машине только более высоким коэффициентом полезного действия (КПД), но и допускающие регулирование коэффициента мощности с целью компенсации реактивной мощности всего оборудования.
В многоскоростных приводах, обеспечивающих ступенчатое регулирование скорости, применяют многоскоростные трёхфазные асинхронные двигатели с короткозамкнутым ротором, допускающие путём переключений в цепи обмотки статора получать две, три или четыре частоты вращения ротора.
В регулируемых приводах с плавным изменением скорости в небольшом диапазоне используют трёхфазные асинхронные двигатели с фазным ротором, а при широком диапазоне регулирования — двигатели постоянного тока с соответствующей системой возбуждения, определяющей жёсткость механической характеристики в соответствии с требованиями производственного агрегата.
Таким образом, род тока двигателя всецело определяется условиями технологического процесса, а напряжение выбирают в соответствии со стандартными напряжениями питающих сетей и учётом технических данных двигателей.
Например — трёхфазные асинхронные двигатели серии 4А при диапазоне номинальной мощности от 0,06 до 0,7 кВт изготовляют только на напряжение 220 или 380 В, при диапазоне от 0,55 до 11 кВт — на напряжения 220, 380 или 660 В, а при диапазоне от 15 до 110 кВт — на напряжения 220/380 или 380/660В.
Если же номинальная мощность двигателя находится в пределах от 132 до 400кВт, то такие двигатели изготовляют на напряжения 380/660В.
Трёхфазные асинхронные двигатели других серий номинальной мощностью свыше 200кВт изготовляют на напряжения 3, 6 и 10кВ. Для двигателей постоянного тока серии 2Д с диапазоном номинальной мощности от 0,37 до 200кВт при номинальной частоте вращения 1500 об/мин приняты напряжения 110, 220, 380 и 440В, а напряжение независимого возбуждения — 110 и 220В. Более мощные машины постоянного тока других серий изготовляют на повышенные напряжения, которые обычно не превышают 1500В.
Предприятия-изготовители выпускают открытые, защищённые и закрытые электродвигатели.
Двигатели открытого типа с большими вентиляционными отверстиями в подшипниковых щитах и станине для лучших условий охлаждения целесообразно применять в немногих случаях: приходится считаться с легкостью засорения такого двигателя в производственных условиях от посторонних предметов, пыли, влаги и грязи и опасностью поражения током обслуживающего персонала при прикосновении к открытым токоведущим частям.
Двигатели защищенного типа имеют вентиляционные отверстия, которые закрыты решетками, защищающими двигатель от попадания внутрь капель дождя, посторонних частиц, опилок и т. п., но не пыли. Такие двигатели могут устанавливаться на открытом воздухе.
Двигатели закрытого типа устанавливаются в запыленных помещениях при наличии в воздухе паров едких испарений и т. и. Для улучшения охлаждения таких двигателей применяется продувание охлаждающего воздуха. Последний подводится и отводится по специальным воздухопроводам. В сырых помещениях применяются защищенные двигатели со специальной влагостойкой изоляцией. Во взрывоопасных помещениях, содержащих горючие газы или пары, устанавливаются взрывозащищенные двигатели.